
CP助手使用方法首先获取最新版CP助手

获取安装包后,将安装包移动端游戏根目录pdlc文件夹中
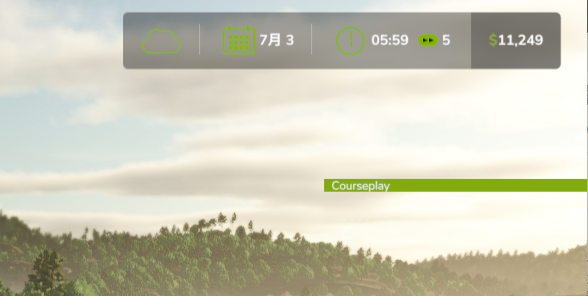
当该功能启用时,画面上就会像这样出现显示内容。通过右键点击可以唤出鼠标光标,这样就能通过拖动将其移动到任意你喜欢的位置。
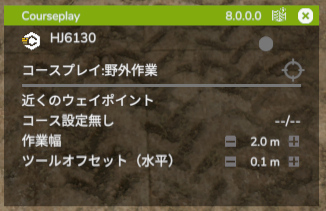
登上车辆后,会显示这样一个窗口。点击写有 “CoursePlay:野外作业” 这一行右侧的瞄准标记,就会打开菜单。
(日本玩家写的教程,所以是日文。。。。)

首先,点击最左端图标列表最上方的图标,打开全局设置,然后将 “用户设置” 中的 “专家模式” 开启。
使用方法:野外作业
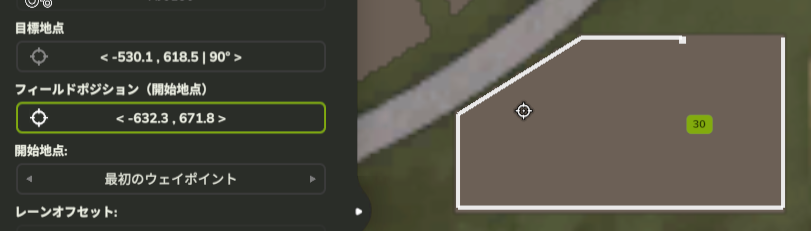
首先,将车辆移动到想要进行作业的农田附近,然后打开 CoursePlay 的任务创建界面。

在 “田地位置” 处指定想要进行作业的田地里的某个点。要确认目标田地被白色边框所包围。
因为要开始作业就必须创建路线,所以点击 “生成野外作业路线” 按钮后,就能确认到路线会按以下方式生成。
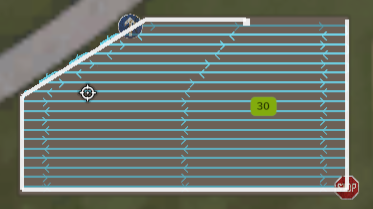
在此状态下,按下 “开始工作” 按钮,(车辆)就会沿着这条路线移动并同时开展作业。
关于地头的设置相关内容

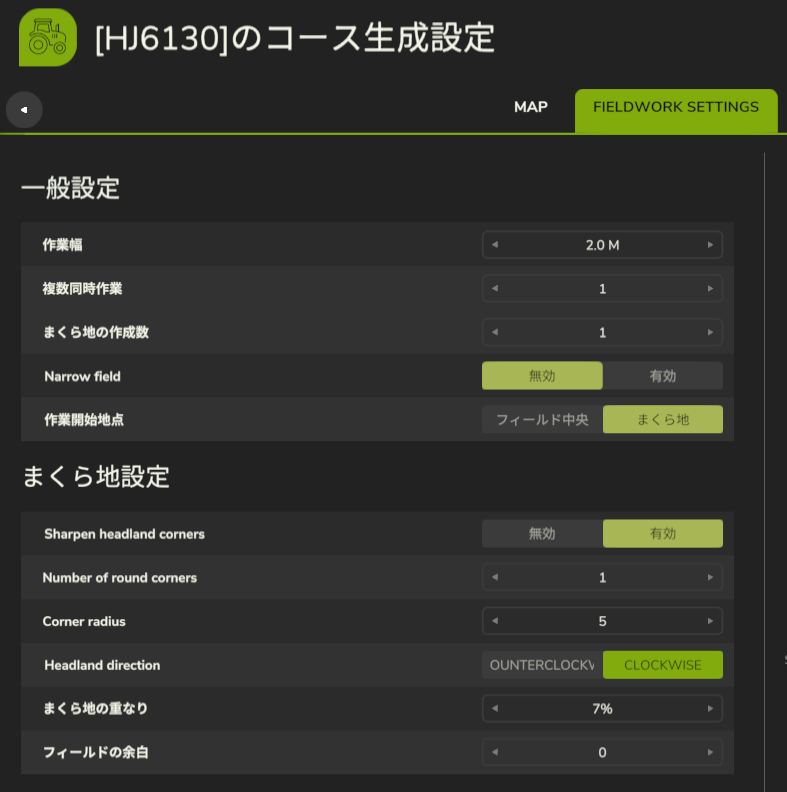
启用 “harpen headland corners”,就能生成在地头角落转弯并呈直角弯折的路线。
(不过,从外侧数起,“Number of round corners”(圆角数量)指定数量的地头,会跳过直角处理。外侧的地头,由于作业时需避免离开农田,直角转弯时折返次数往往较多,所以为提高作业速度,只有最外周可以设置成圆角转弯。)
路线示意图如下(源自官方指南)。
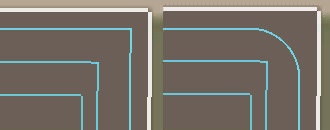
正如官方指南所述,若要让作业完全在农田内进行,必须将作业宽度 × 地头创建数量设置为大于车辆与附件组合后的总长度。
在以下图片中,车辆的总长度明显大于割草机 6 米的宽度,所以仅设置一圈地头的话,作业就会超出农田范围。

农田内设置
作业区域(农田中央部分),可以设定非地头的内侧(农田内)路线生成模式。
启用 “Even row width”(平均行距)后,农田内的列(车道)会根据作业面积进行平均分配。
假设作业区域宽 10 米,作业宽度为 4 米,若该选项处于无效状态,作业区域会被分成 4 米、4 米、2 米来进行作业;而启用后,就会以每个车道 3.33 米左右的宽度来进行作业,大致是这样的感觉。
将 “Up/down row direction”(行方向上下调整)设置为 “manual”(手动),就可以自行决定车道的角度。
当农田形状不规则,因转弯问题导致生成的路线容易卡住或效率不高时,可以通过这个项目进行手动调整。
在 “レーンのスキップ”(车道跳过数量)中设置 1 及以上的数字,就会按设定的数量跳过车道进行折返。
例如,正常车道的作业顺序是①②③④⑤,设置后就会生成①→③→⑤这样折返的路线。
(当然,跳过的车道在走到尽头返回时会按④→②的顺序进行作业,所以并非不进行作业。)
简而言之,这是为了在折返时让转弯更平缓的选项。
如果与下一个车道的间隔>转弯所需的直径,就可以在不折返或倒车的情况下完成转弯。例如,转弯半径是 5 米,那么作业宽度在 10 米以下时,将跳过数量设为 1 比较合适。
顺便说一下,让打捆机进行作业时,折返时如果需要倒车,可能会被自己打好的草捆挡住,所以至少设置为 1 比较好。
显示器(Mini HUD)使用方法
使用方法:联合收割机
选择带有拖车的车辆来创建作业任务时,就可以选择 “CP:联合收割机卸料” 这一作业任务。

在 “田地位置” 指定联合收割机正在进行收割作业的农田,(所选车辆)就会自动与该联合收割机并排,进行收割物的接收工作。

在创建作业任务时,如果通过 Giants Helper 设定了卸货及卸货地点,那么当拖车装载量超过 “Empty when over:(满载比例)” 所设定的比例时,卸货也能实现自动化。
打捆作业自动化
通过保存使用割晒机作业时的路线,并让打捆机沿相同路线行进,就能实现原本无法做到的打捆作业自动化。
首先要用割晒机开始作业,参考以下视频可知,似乎将地头创建数量设为 2,作业起始地点设为农田中央,地头的拐角设为锐利(直角)比较好。
(实际尝试后发现,对于割晒机作业而言,在较狭窄的农田里,地头数量设为 1 可能更好。而且,即便使用的打捆机每次打捆时都需要停下,也能顺利完成作业。)
多辆车之间共享路线的方法是,首先在正在作业的割晒机上,打开菜单,进入 CoursePlay 的路线管理。
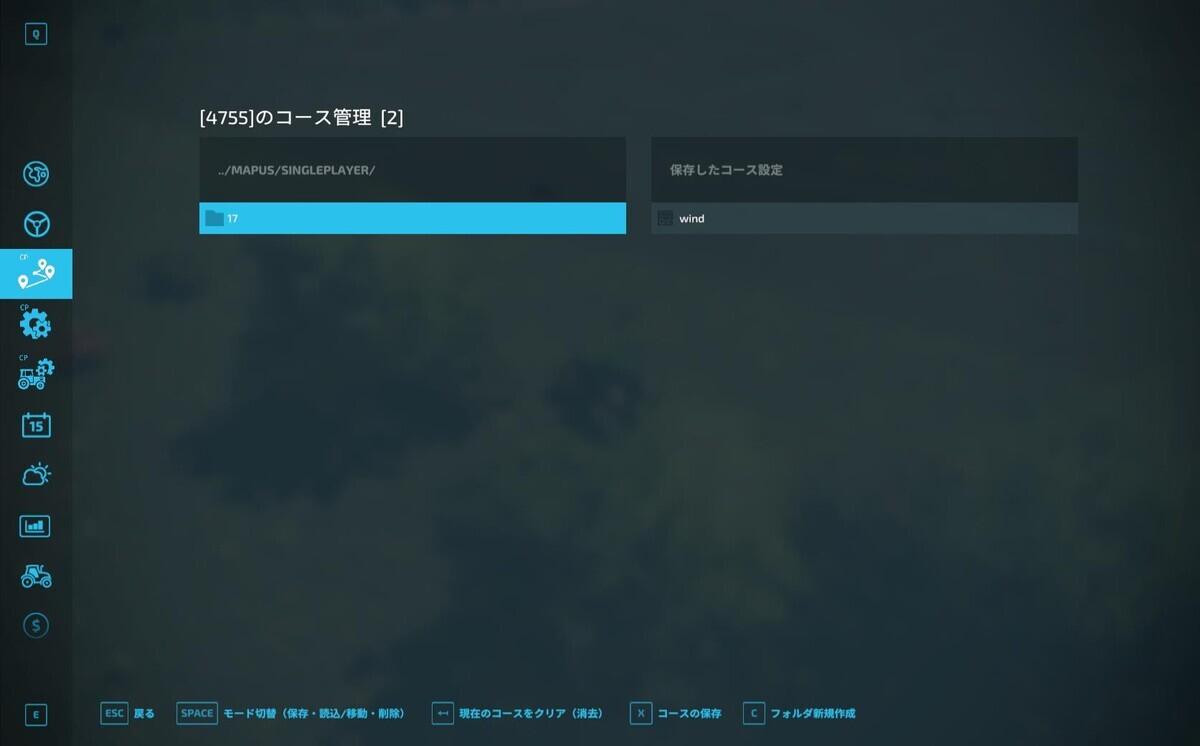
因为没有文件夹好像就无法保存,所以随便创建个文件夹,然后点击 “保存路线” 按钮。
接着,登上打捆机,打开路线管理,先用 “清除当前路线” 将现有路线清除,之后选择刚才保存的路线,再点击 “加载路线”。
这样就能让打捆机按与割晒机相同的路线作业了,接下来从 “初始路点” 开始工作就行。
实际让它进行作业,感觉就是这样。虽说有点小毛病,但比起自己动手操作,还是轻松太多了。

使用方法:草捆收集
打好草捆后,(该系统)自然也能应对使用草捆缠绕机对草捆进行缠绕,或者用草捆装载机进行收集的工作。
使用方法很简单,只需在安装好草捆装载机等相应附件的状态下,创建 “CoursePlay:草捆收集 / 缠绕” 的工作任务即可。(务必在 “田地位置” 准确指定草捆散落的农田 )

不过,遗憾的是,与 “卸料” 功能不同,草捆装载机似乎不会自动卸载草捆。因此,当草捆装载机装满后,需要另外创建转移的工作任务。
评论0